はじめに
皆さんは、Auxetic構造という言葉を聞いたことがあるでしょうか。Auxetic構造は通常の構造とは異なる変形挙動を示すという特徴を持ち、メタマテリアル((1)現代の製造業にメタマテリアルが必要な理由)の一種として位置づけられることもあります。Auxetic構造は、衝撃吸収性、振動減衰性、音響遮断性などにおいて優れたポテンシャルを持つと言われ、現在、基礎研究から産業応用に至るまで幅広く研究が進められています。本記事では、いくつかのAuxetic構造を紹介するとともに、実験や数値シミュレーションを通して、その魅力を掘り下げていきたいと思います。
Auxetic構造の紹介
定義
Auxetic構造はポアソン比に関係するため、まずポアソン比について整理します。
ポアソン比は、材料を横方向に引張(または圧縮)したときに、縦方向にどれくらい細く(または太く)変形するかを表す材料物性です。図1は変形の模式図で、変形前を実線、変形後を破線で示しています。図1中の記号と縦ひずみ\varepsilon、横ひずみ\varepsilon'を用いて、ポアソン比\nuは式(3)で定義されます。
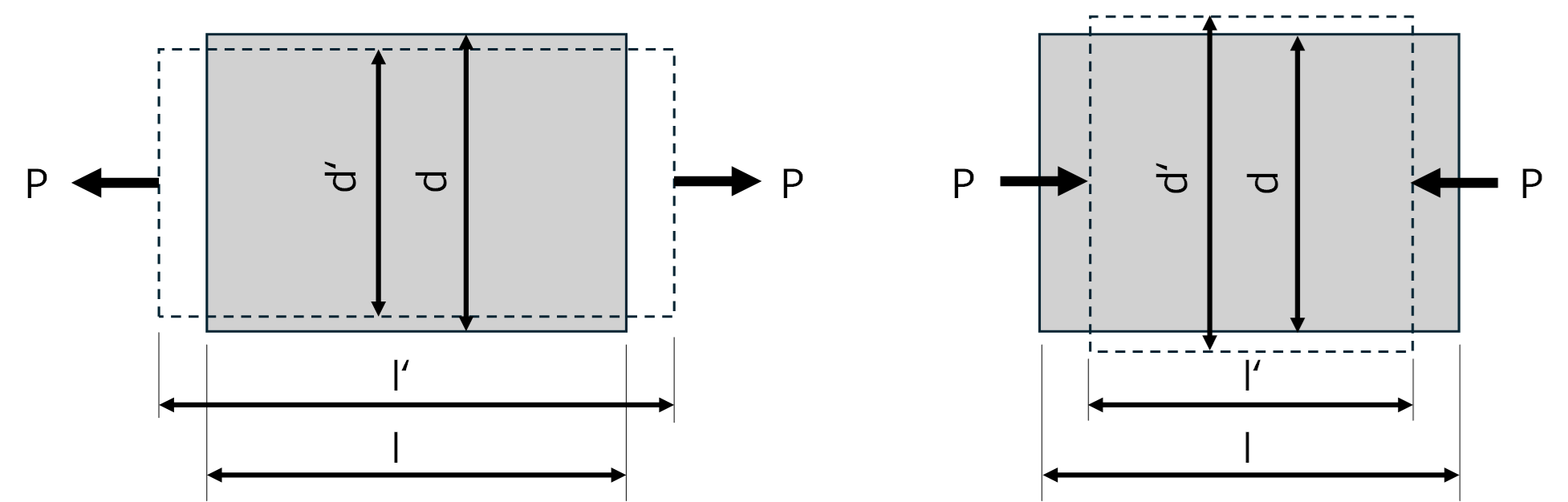
\varepsilon = \frac{l' - l}{l}\tag{1}\varepsilon' = \frac{d' - d}{d}\tag{2}\nu = -\frac{\varepsilon'}{\varepsilon}\tag{3}通常、ポアソン比は正の値をとります。つまり、横に引っ張ると縦に縮みます(または横に圧縮すると縦に伸びます)。これに対して、Auxetic構造は負のポアソン比を持つ構造と定義されます。つまり、横に引っ張ると縦にも伸びる(または横に圧縮すると縦にも縮む)構造を指します。Auxetic構造には、材料のポアソン比が正であっても、工夫された幾何形状によって、マクロなスケールで見たときのポアソン比が負となる構造も含まれます。
幾何形状とメカニズム
Auxetic構造は、1987年に初めて発表[1] されて以来、さまざまな幾何形状が考案されています。本記事ではAuxetic構造を8つのメカニズムに分類した文献[2] を引用し、そのうちの4つを紹介します。
Re-entrant mechanism
Re-entrantの例を動画1に示します。動画1に示す構造は、6本の梁がなす砂時計形のユニットセルが繰り返し配置されたものです。梁間の交点はヒンジであり、回転可能とします。
メカニズムの説明のために、上下方向に圧縮するケースを考えます。水平な梁に対して、斜めの梁が梁間のなす角度が小さくなるように回転することで、砂時計のくびれが内側に入り込む変形が生じます。くびれには隣のユニットセルの水平な梁が接続されているため、結果として、構造全体が左右方向にも縮み、負のポアソン比が実現されます。引張のケースも同様です。なお、ユニットセルの形状には、砂時計形の他に、矢じり形や星形などがあります。
実用面では、例えば、ステントという血管を内部から支える医療器具への活用[3] が研究されています。設置場所で血管の径方向に拡大する際、軸方向にも伸びるため、支持面積を増大できることが期待されます。
Rotating unit mechanism
Rotating unitの例を動画2に示します。動画2に示す構造は、正方形のユニットセルが繰り返し配置されたものです。ユニットセル間の交点はヒンジであり、回転可能とします。
メカニズムの説明のために、上下方向に圧縮するケースを考えます。2×2の4つのユニットセルに注目すると、圧縮荷重により各ユニットセルに生じるトルクの向きは、隣同士のペアは逆向きで、向かい合わせのペアは同じ向きとなります。すると、4つのユニットセルによって囲まれる角穴は、回転に伴いつぶれていきます。結果として、構造全体が左右方向にも縮み、負のポアソン比が実現されます。引張のケースも同様です。なお、ユニットセルの形状は非常に多様で、正方形の他に長方形や三角形、あるいはサイズ違いの四角形を組み合わせたものなどがあります。
実用面では、例えば、容量式ひずみセンサーにRotating unitを組み込み、電極面積の変化率を大きくすることで、感度を向上させる研究[4] が報告されています。
参考まで、Rotating unit mechanismに限りませんが三次元の構造もあり、三次元Rotating unitの例を動画3に示します。
動画2 二次元Rotating unitの例
動画3 三次元Rotating unitの例
Buckling-induced mechanism
Buckling-inducedの例を動画4に示します。動画4に示す構造は、横長の穴と縦長の穴が互いに隣り合うように繰り返し配置されたものです。メカニズムについては後述します。
実用面では、例えば、エネルギー吸収材への活用を想定し、金属板に空ける穴のサイズや配置によって、剛性とエネルギー吸収量を調整可能とする研究[5] が報告されています。
ミウラ折り
ミウラ折りを動画5に示します。動画5に示すように、ミウラ折りは一枚のシートにジグザグの折り線をつける折りパターンです。XY方向に展開または折り畳まれるため、Auxetic構造の一種と捉えることができます。
実用面では、コンパクトに畳め、すぐに展開できる特徴から紙の地図に活用されています。また、太陽電池パネルのような大きな板状の構造物を宇宙空間に低容積で運搬し、展開・収納する機構として、軌道上で二次元展開実験[6] が行われました。
実験と数値シミュレーション
目的
Auxetic構造を実際につぶし、変形挙動、マクロなポアソン比、荷重–変位特性(以下、FS特性と呼びます)について、定性的な特性を把握することを目的とします。さらに、数値シミュレーションにより、これらの再現と応力状態の可視化を行います。
対象
さまざまな幾何形状のうち、Buckling-inducedを対象とします。これは、他の幾何形状のようなヒンジを持たないため応力集中が比較的緩和されることが期待でき、また形状の単純さから製造性が優れています。対象の形状と寸法を図2に示します。
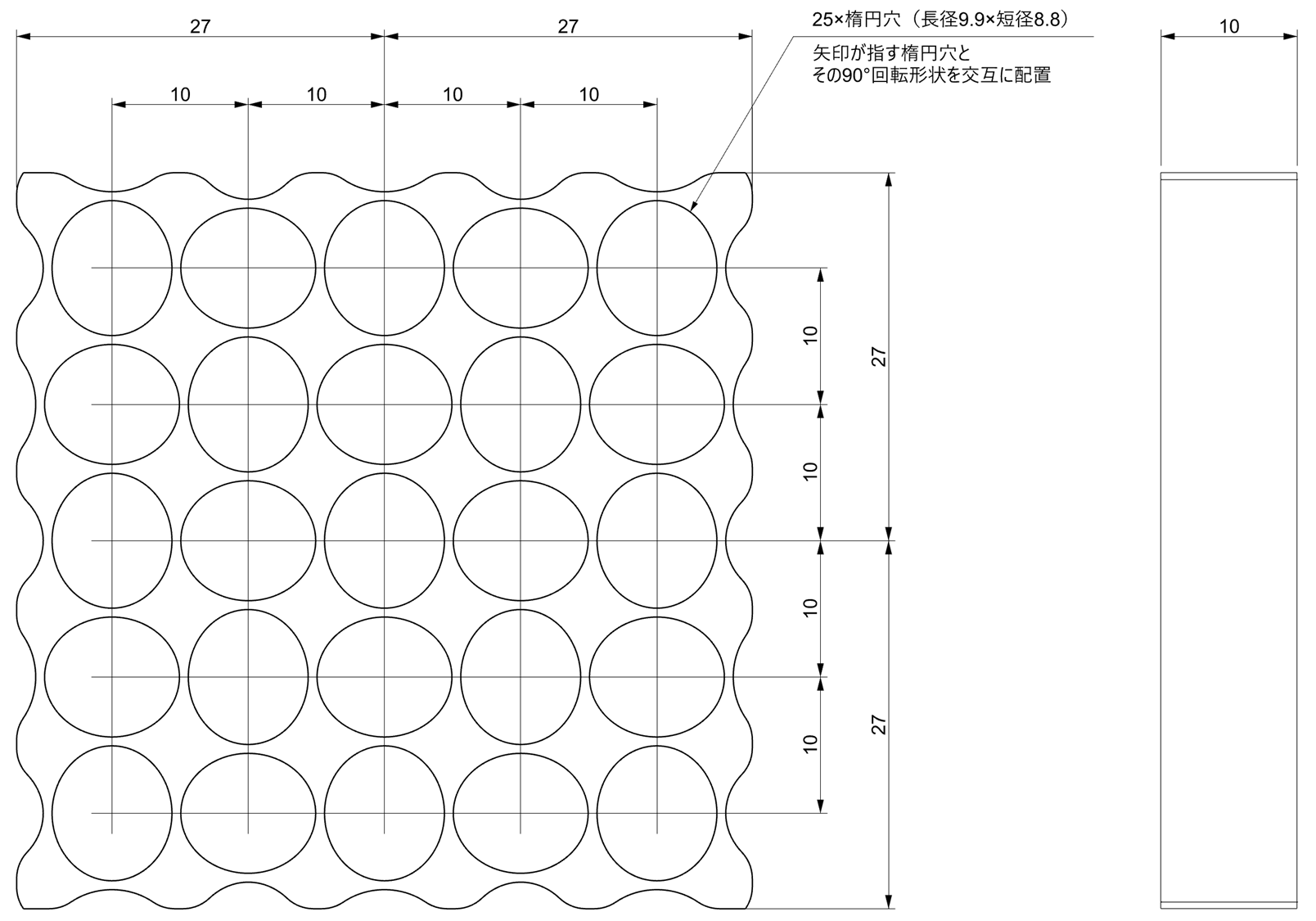
条件
実験では、卓上型圧縮試験機の上下の金属板間に対象を設置し、上板を動かすことで圧縮荷重を加えます。実験条件を表1に示します。
なお、入手の容易さから、試験体としてFDMで印刷したものを用います。FDMの特性上、パス間やレイヤー間に材料が完全に充填されませんが、定性的な特性把握という目的に対してそれらの影響は支配的ではないと考え、今回は許容することとします。
表1 実験条件
| 試験体の製造手法 | FDMでの3Dプリント |
| 試験体の材料 | TPU、硬度95A |
| 試験体の数 | 3 個 |
| 試験機速度 | 10 mm/min. |
| その他 | 摩擦を低減し、意図する変形を促すため、上下の金属板にテープを貼付 |
| 未負荷状態の試験体を使用 |
数値シミュレーションでは、対象の一部を変位拘束し、剛な壁を強制変位させることで、圧縮荷重を加えます。数値シミュレーションの主たる条件を表2に示します。
なお、Buckling-inducedは面内変形が主であると仮定し、また計算コストの軽減のため、平面ひずみ条件で近似します。
また、Ogdenモデルは、ゴムなどの超弾性材料の代表的なモデルの一つです。その材料定数は、硬度95AのTPUを用いた3Dプリント品を対象に材料試験を実施し、モデル化を行った文献[7] から引用します。この材料モデルでのひずみ100%時の応力は、材料データシートの記載値と一致しています。厳密には材料成分や造形条件が文献と異なりますが、定性的な特性を把握する分には、材料特性よりも幾何形状の方が大きな影響を与えるだろうという予想のもと、自身での材料試験は割愛します。
表2 数値シミュレーションの主たる条件
| 手法 | 静的FEM |
| 次元 | 平面ひずみ(二次元)で近似 |
| 材料モデル | Ogdenモデル |
| 境界条件 | 壁を強制変位 |
| 上下左右対称の応力・ひずみ状態を仮定(1/4モデルを使用) | |
| 接触 | 対象と壁間は摩擦なし |
| 対象の自己接触は摩擦あり |
結果
変形挙動とメカニズムの分析
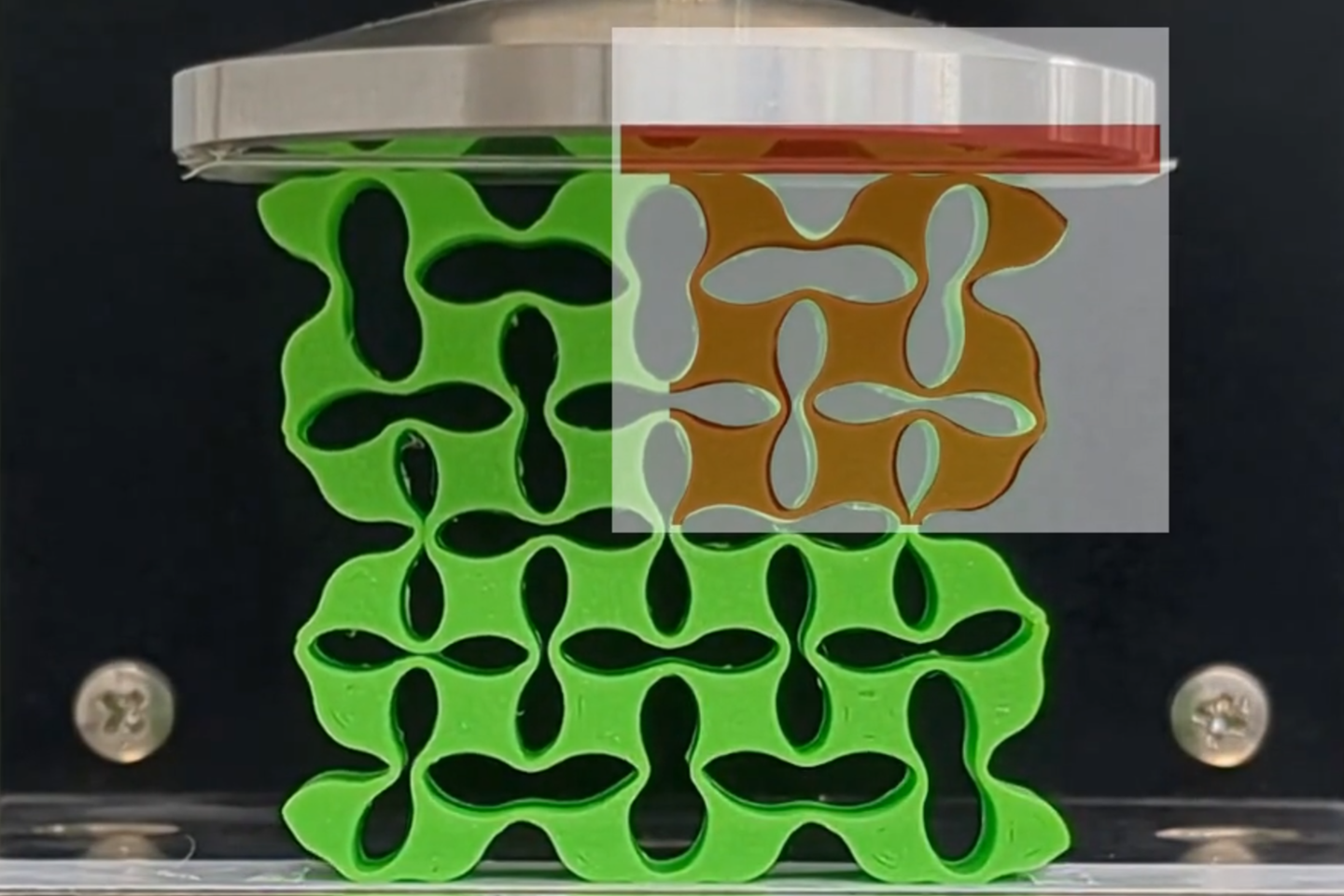
実験結果と数値シミュレーション結果を重ね合わせた動画を動画6に示します。おおまかではありますが、実験における上板の位置と数値シミュレーションにおける壁の位置を一致させ、再生速度を現実の5倍速で揃えています。また、最大主応力を可視化した結果を動画7に示します。
動画6で変形挙動を確認すると、はじめは楕円穴がより細長くなるように滑らかに変形します。その後、隣の穴から短径方向に押し出されるような変形が生じ、同時に隣の楕円穴を長径方向に押し出すような変形が生じます。これらの変形が進行すると、穴の輪郭が折れ始め、座屈的挙動を確認できます。変形がさらに進行すると、一部の穴で自己接触することがわかります。メカニズムとしては、座屈的挙動によって構造全体が左右方向に内側に変形するために、負のポアソン比が実現されます。また、数値シミュレーションは実験と定性的に一致し、主要な変形挙動を再現できました。
動画6 実験と数値シミュレーションの比較
動画7 最大主応力の可視化
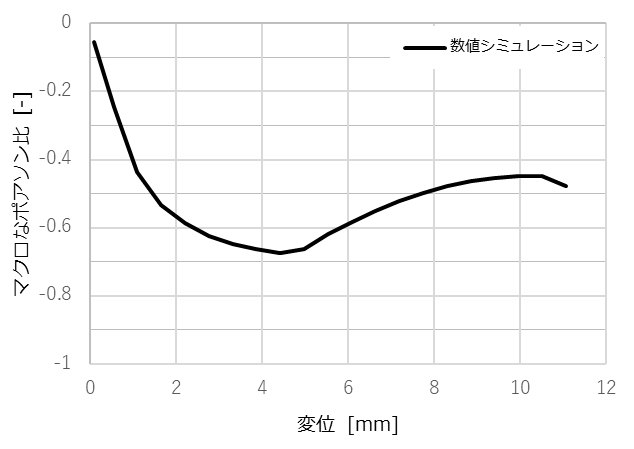
マクロなポアソン比
マクロなポアソン比と変位の関係を図3に示します。マクロなポアソン比は、式(2)のdおよびd'に対して、数値シミュレーション結果から得られる節点座標の最大値を用いて算出します。
図3からマクロなポアソン比は負であることが確認でき、参考値として最小値は-0.67でした。
FS特性
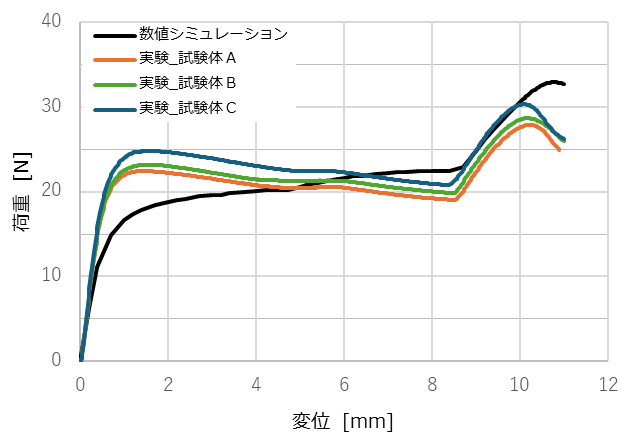
荷重と変位の関係を図4に示します。
図4の実験結果を見ると、変位初期では、通常の弾性体と同様、線形な特性になっています。その後、勾配がなだらかなプラトー領域が現れます。これは座屈のような変形が進行している領域と考えられます。プラトー領域が終了すると剛性が急上昇します。これはある穴で自己接触が生じ、変形が拘束されるためと考えられます。最後に負剛性が現れるのは、自己接触した穴の変形が進行しきると、他の穴の座屈のような変形によって荷重が低下するためと考えられます。図示の範囲外ですが、この後、他の穴で自己接触が生じると、剛性は再度急上昇することが予想されます。
図4の実験と数値シミュレーションを比較すると、線形に立ち上がり、プラトー領域を経た後、剛性が急上昇するという全体の定性的な傾向は一致しました。また、プラトー領域の開始と終了における変位や、開始と終了における荷重の平均値はおおむね一致しました。
一方、プラトー領域の勾配と開始荷重には差異が見られました。この要因として、材料モデルや接触条件、寸法誤差が考えられます。特に材料モデルについては、引用元の文献[7]で用いられている材料(成分組成、製造工程)や造形条件(温度、流量、積層ピッチ、パス太さなど)との差異が、FS特性全体に影響した可能性があります。材料試験を実施し、材料モデルを構築することで、実験結果との一致性がさらに向上することが期待できます。また接触条件については、壁との接触部において左右方向への変形が阻害されないように簡易的に摩擦なしの条件としましたが、摩擦係数を調整することで実験結果との一致性がさらに向上する可能性があります。寸法誤差については、特に穴間の最小肉厚部がFS特性全体に影響を及ぼした可能性があります。
結論と展望
Buckling-inducedを対象に、実験と数値シミュレーションによって、変形挙動、マクロなポアソン比、FS特性について定性的な特性を把握しました。結果として、変形挙動は実験と数値シミュレーションが定性的に一致し、マクロなポアソン比が負となり、FS特性にはプラトー領域が現れることが確認されました。
今回、定量的な再現には至りませんでしたが、軽量な計算コストで、変形挙動を定性的に再現できたことから、ラフな形状探索には応用可能だと考えられます。例えば、文献[5]と同様にエネルギー吸収材として活用する場合、プラトー領域によって低荷重で多くのエネルギーを吸収できる特徴を活かすことができ、その設計の際には、正確なエネルギー吸収量は予想できなくとも、優れた形状候補の探索・抽出に有効であると期待できます。
おわりに
いかがだったでしょうか。Auxetic構造の変形メカニズムの肝は回転または座屈にあること、またそれらを実現する多様な幾何形状があること、さらにプラトー特性をはじめとするAuxetic構造の特徴を活かした実用化が進められているといった魅力をお伝えできたのなら幸いです。3Dプリンタをお持ちの方は印刷してみて、実際につぶしてみると一層面白いと感じられるかもしれません。最後までお読みいただき、ありがとうございました。
参考文献
[1] Rod Lakes, Foam Structures with a Negative Poisson’s Ratio. Science, 1987.
[2] Hyeonho Cho, Dongsik Seo, Do-Nyun Kim, Mechanics of Auxetic Materials, pp 733–757, 2019.
[6] JAXA “宇宙実験・観測フリーフライヤ SFU”
URL: https://www.isas.jaxa.jp/missions/spacecraft/past/sfu.html (最終アクセス:2026/3/25)
